Major Update: Consolidating Versions for Enhanced Efficiency
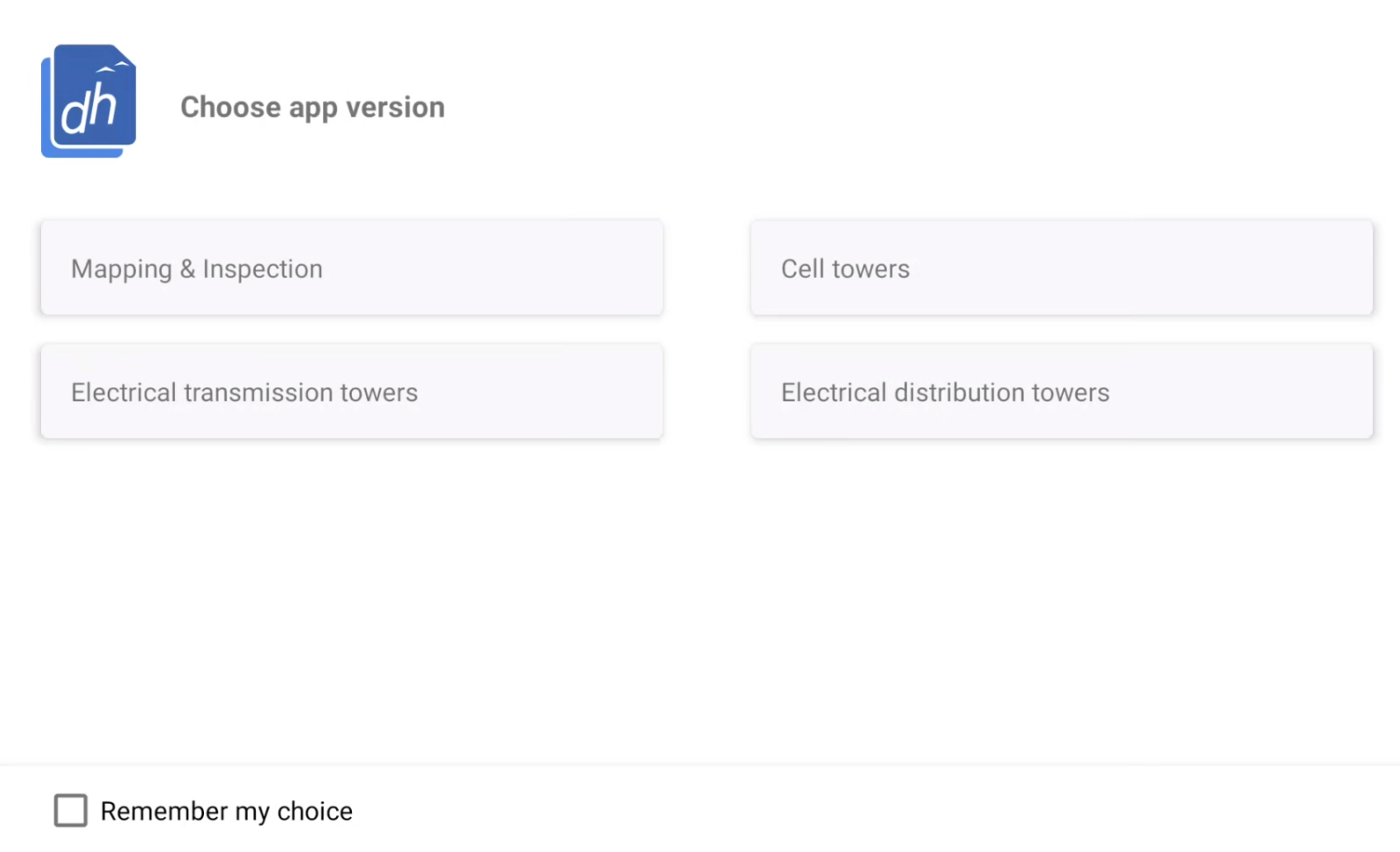
We’re thrilled to announce a major update that combines all versions of our app into one streamlined platform, providing enhanced convenience and efficiency for both enterprise and professional users. Consolidation of Versions With this update, we have merged all versions of the app into a single comprehensive platform. This consolidation includes: Improved Accessibility Upon opening...
April 16, 2024